1.创建机器人工作站布局
2.由布局配置机器人控制系统
3.同步现场数据至控制器
4.设定切换末端执行器
5.示教编程
6.仿真运行
一、示教编程
1. 点击左上角的“ABB” 菜单![]()
![]() 按钮,在弹出的菜单中点击“程序编辑器”
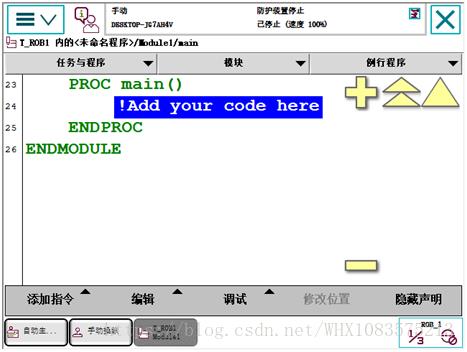
按钮,在弹出的菜单中点击“程序编辑器”![]() ,弹出程序编辑器画面,如下图所示。
,弹出程序编辑器画面,如下图所示。

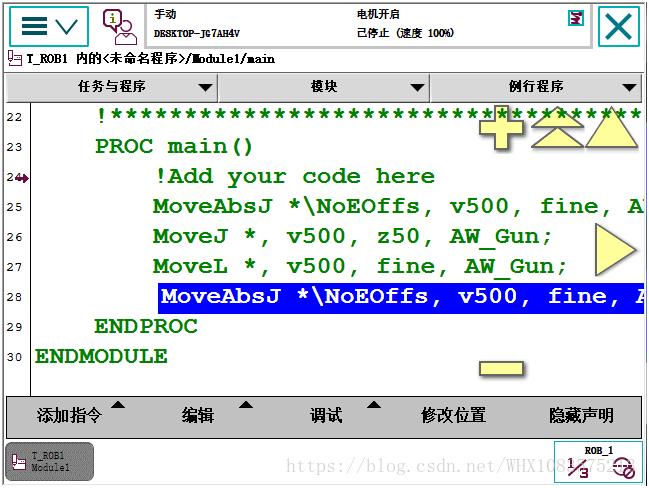
2.点击虚拟示教器操作面板上的“Enable” 按钮,为机器人上使能,示教器状态栏中机器人状态由“防护装置停止”切换为“电机开启”,如下图所示。
![]()
![]()
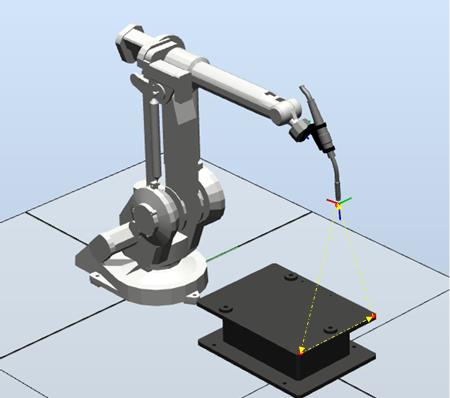
3.使用虚拟示教器对机器人进行示教编程,轨迹如下图所示。
示教程序如下图所示。
二、仿真运行
点击菜单栏中的“仿真”,点击“播放” 工具![]()
![]()
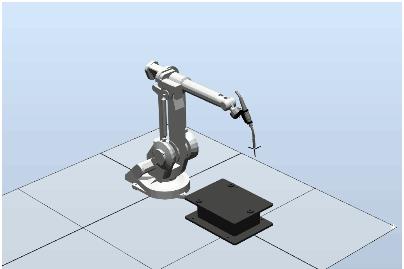
,机器人开始按照示教轨迹自动运行,如下图所示。
125jz网原创文章。发布者:江山如画,转载请注明出处:http://www.125jz.com/10456.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫